מספקים פתרונות אוטומציה לפי דרישה כדוגמת ראייה ממוחשבת וליטוש
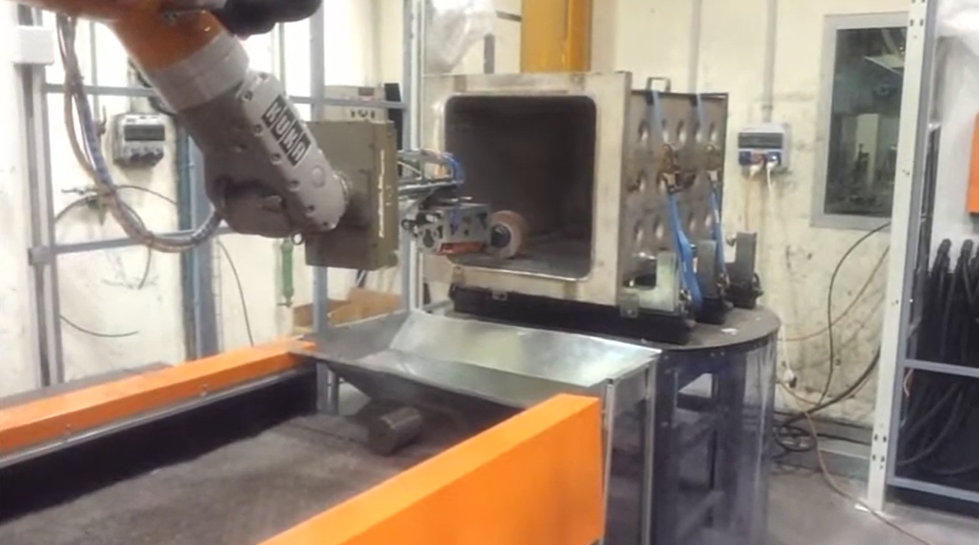
ליטוש
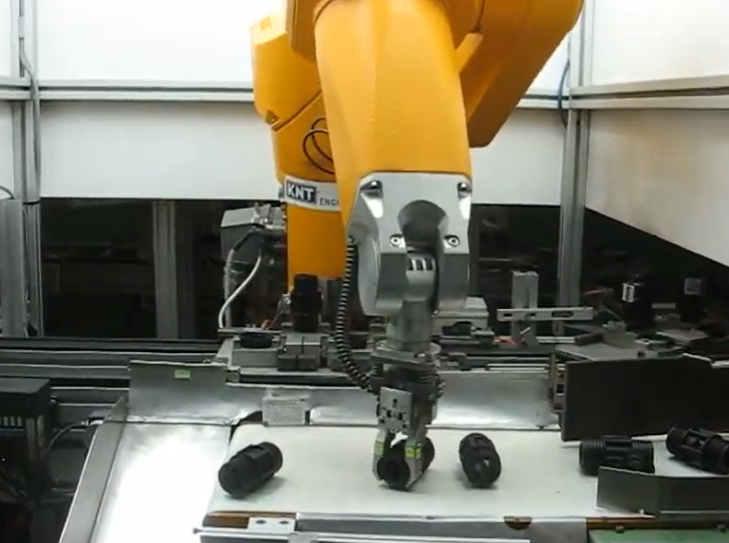
ראייה ממוחשבת בשילוב בפרויקט אוטומציה או כפרויקט עצמאי
עבודה עם מספר רב של מצלמות
זיהוי וסיווג פגמים
בדיקת גודל ומיקום של חלקים
ממשק משתמש מלא
ראייה ממוחשבת בשילוב בפרויקט אוטומציה או כפרויקט עצמאי
עבודה עם מספר רב של מצלמות
זיהוי וסיווג פגמים
בדיקת גודל ומיקום של חלקים
ממשק משתמש מלא